


Sponsored by OXTS
Real-time localization is a crucial capability for many applications within the geospatial industry, and a growing number of applications outside of it as well. Consider, for example, the growing market around autonomous vehicles. For these vehicles to be deemed safe for use, OEMs have to be able to accurately and reliably verify the vehicles location throughout its journey, whether that’s out in the countryside, in a built-up urban environment, or even a tunnel. In the geospatial industry, of course, for use cases like mobile mapping that localization needs to be accurate for the high-resolution, millimeter-accurate point clouds to be of real use. However, getting this consistently reliable localization data across complex environments has long been easier said than done, with GNSS-denied areas in particular causing these problems.
It’s this issue that OXTS aimed to address with their latest release, WayFinder. The new navigation solution combines the expertise of OXTS in the world of inertial navigation with other sensors to create a turnkey navigation solution designed for use on land-based vehicles (but can be used on other platforms where the use case fits) and deploy accurate localization at speed. With the GNSS/IMU combination that OXTS has long used along with their onboard processor, WayFinder adds in a lidar scanner along with two cameras to create a solution that works across any environment.
Paris Austin, Head of Product for OXTS, told Geo Week News, “What we wanted to do was bring our sensor fusion expertise into a product that is easy to use, with a real-time output that gives you the best interpretation of where you are in the world.”
Austin discussed all of the many applications for which this accurate localization is crucial, including surveying, autonomous machines, and georeferencing collected data in the form of both point clouds and imagery. Regardless of the use case, he says, “it is only worth attempting precision navigation if your localization was accurate in the first place.”
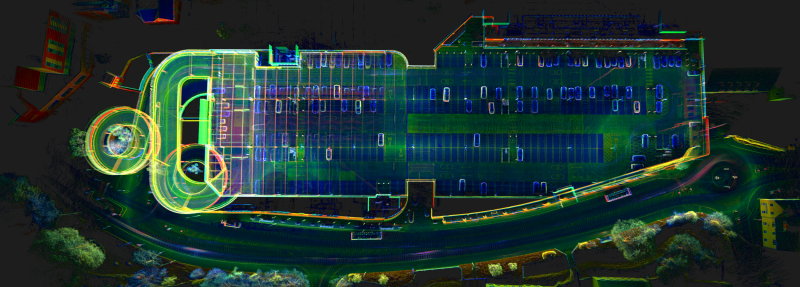
He continued, “There’s no real point trying to make a point cloud with a millimeter resolution lidar if your trajectory is 50 centimeters accurate over the area surveyed, because you’ll end up getting warping, distortion, or purely a lack of clarity in the point cloud it produces. Having that capability now to use lidar for navigation purposes, not just for geo-referencing, means that we can produce better localization, which then feeds into producing better point clouds.”
At its core, much of the value from WayFinder comes from its efforts to draw from many different technologies to ensure that it can operate in any environment. For example, the product utilizes lidar to constrain position drift and maintain localization accuracy in mobile applications when GNSS is intermittent or unavailable, however it maintains its GNSS connection for use when GNSS is available, separating it from SLAM-like use cases. In the latter, the data collection is happening in a local-coordinate based system, limiting the area for which it will work and creating distortion in larger project areas unless ground control points are laid, which ultimately defeats much of the value provided by SLAM’s ability to “break free from GNSS”. WayFinder, meanwhile, maintains the global frame, eliminating the need for ground control points, but benefitting from local frame navigation.
“I’m a very strong advocate of not saying a company should break completely free from Technology X,” Austin said. “We are very keen on trying to use the best bits from multiple technologies together at the same time, and subsequently getting rid of their weaknesses. That’s why we’ve incorporated the good bits of SLAM while maintaining the best of what GNSS can give you. For us, an RTK update from GNSS is a loop closure event, because it resets your error to zero as soon as you get that update.”
The versatility of WayFinder is another one of its main calling cards, not being limited to any specific application or platform. Ground vehicles are naturally one of the initial primary users, whether that’s in developing autonomous vehicles, mobile mapping applications, or the use of autonomous machinery in complex project environments for industries like mining or construction. As Austin points out, many of these applications have used lidar on vehicles for years, but that’s largely been for obstruction avoidance (both moving and static), not localization.
Drawing from the mining industry, he gave an example of how that difference can functionally affect these companies. “With WayFinder, you’ve got the benefit of being able to georeference long and short term obstructions location in the world. If there’s a boulder in the road while you’re traversing your mine, for example, you could then georeference where the obstruction is, commit it to a static lidar map, and then another vehicle would access that map to know where that object is going to be before they can visibly see it. So, you’ve got the ability to have that foresight, where fleets of vehicles can operate in the same space and share information with each other.”

As noted above, though, this work is not just limited to wheeled vehicles. There are plenty of applications where localization is going to be important for which traditional vehicles won’t be accessible, but instead it makes more sense to utilize a robot like Boston Dynamics’ Spot the Dog, or have a surveyor walk an area with a backpack sporting WayFinder, or to fly a drone through the location. WayFinder, weighing just 3.25 kg, is designed to be easily swapped between platforms and configured wherever makes the most sense for the application.
Austin also indicated that OXTS is envisioning this as being just the beginning of where WayFinder could end up. He noted that they see it as being a platform off of which they can build, and the direction that goes will be dictated by where the market trends.
“We can artificially turn sensors on and off as simulations of what customers would experience if they decide they only need some sensors, like IMU and lidar. Given the right commercial opportunity for both sides, we could build a new product with only the sensors needed for a given application. WayFinder as it is today isn’t necessarily the final form that will get iterated on. It could be that this is the starting point and we fork off into multiple products over the next five years, but it all starts with the fact that we’re able to localize in GNSS-denied environments.”
For OXTS, it’s about supporting these industries from geospatial and beyond, giving them the foundation necessary for their varying applications.
“If you start with the good localization, you can go on to do whatever you need to do. Knowing when, and where, you are in the world is very powerful information for making intelligent decisions about what to do next, but it is only the first beginning of a much bigger task being undertaken by many in industrial and commercial applications globally.” Austin said.
Learn more about the OXTS WayFinder here.


