

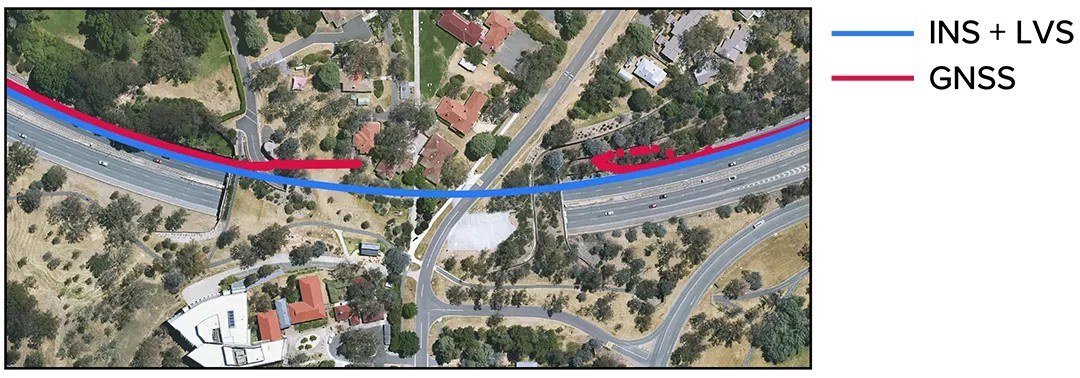
Advanced Navigation announced a hybrid solution for long endurance GNSS-denied navigation. The system does not rely on GPS, but rather a combination of INS and laser-based velocity aid. Held together by intelligent software, the solution can dynamically weigh the input from each sensor, adjusting in real time based on reliability scores, environmental conditions, and operational context. This ensures continuous, high-confidence state estimation even when signals are lost, degraded, or distorted.
Vulnerabilities including spoofing and jamming attacks, harsh environments and extreme makes it clear that while GPS will remain a cornerstone of modern infrastructure, it can no longer be treated it as a single source of truth. To protect critical systems and future-proof our operations, a transition from GPS-only to a multi-sensor, inertial-centered architecture is necessary. The Hybrid Navigation System is built with this purpose in mind.
As there is a greater need for easier engagement with the cosmic frontier to deploy satellites, build space stations, and land scientific equipment on the Moon, LUNA’s development is driven by the increasing commercialization that comes with more frequent lunar explorations. The result of several years of R&D, LUNA is set to be demonstrated aboard Intuitive Machines’ Nova-C lander as part of NASA’s Commercial Lunar Payload Services (CLPS) program.
In 2024, Advanced Navigation received a $1m AUD grant by the Australian federal government. The grant helped the team to accelerate the development of the technology for terrestrial applications. By leveraging the engineering insights gained from LUNA, LVS transforms space technology into an Earth-ready solution for GNSS-denied navigation.
LVS hybrid architecture components
The terrestrial adaptation of LUNA fuses a strategic-grade Inertial Navigation System (INS) with a proprietary Laser Velocity Sensor (LVS). An INS uses a computer, motion sensors (accelerometers) and rotation sensors (gyroscopes) to continuously calculate by dead-reckoning the position, the orientation, and the velocity of a moving object without the need for external references such as GNSS/GPS. LVS uses infrared lasers to measure a vehicle’s ground-relative 3D velocity with accuracy and precision.
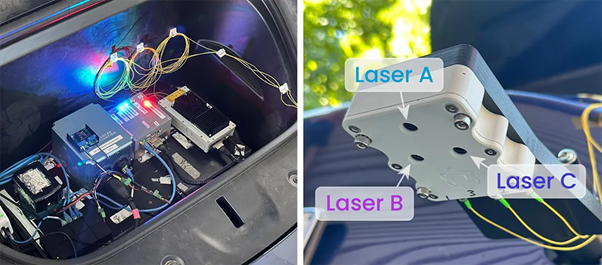
The below image shows configuration of the Boreas D90 FOG INS integrated with LVS in the front of the Tesla Model Y used for ground vehicle testing. The LVS Sensor Head uses three lasers, labelled A, B, and C, to measure the vehicle's ground-relative 3D velocity.
The Hybrid Navigation System will be commercially available later this year. It’s developed to be dual use for the widespread adoption across critical defense, aerospace, robotics and autonomous system sectors.


