

Editor’s note: This piece is the first of two parts.Look out next week for part two, which will include tips for better targeted registration and help understanding your registration report.
A Disclaimer…
Many online tutorials and demonstrations have been developed over the years to address the sometimes-complex process of stitching (registering) 3D laser scans together (or said another way, “putting together a 3D jigsaw puzzle”). I personally started working with point cloud data for the construction industry about seven years ago while at another firm. I had extensive experience with CAD, and both 2D and 3D drafting and cadastral mapping projects, but when I first saw the FARO Photon 3D laser scanner that our firm had purchased and experienced what it did – I immediately committed myself to learning everything I could about it. Some professionals in this industry have been working with 3D laser scan data since it first came on the market; and so…
DISCLAIMER: I have dug my heels in, learning this technology as deeply as I am able to. However, my experience is what it is and to those with more experience, it is my hope that this introductory article does some justice to the industry as a whole and that in some way, sheds light on this process of registration to the newcomer who may feel left in the dark on what this is all about (as I was when I first started). For those of you reading that have much more experience than I, perhaps something will speak to you as well. I certainly appreciate feedback you veterans have, as this is an industry with a lot of moving parts, and one that warrants continuous learning.
I have been using FARO products since the beginning of my 3D scanning career. However, I’ve also used Trimble, Artec, DotProduct, Leica, Artec and other instruments. I’ve processed data, manipulated data, and have created visualizations in FARO Scene, Cyclone, CloudWorx, CloudCompare, LAStools, Rhino, SketchUp, Bentley Systems, Autodesk products and a few others. One thing I can say with certainty is that all 3D scan registration software has similar functionality. While I refer to FARO Scene registration software primarily in this article, I believe the overall concepts translate to other 3D scan processing software.
And, it should be noted that this is by no means an exhaustive article on the subject of registration. Rather, this is covering one small topic of a much larger process.

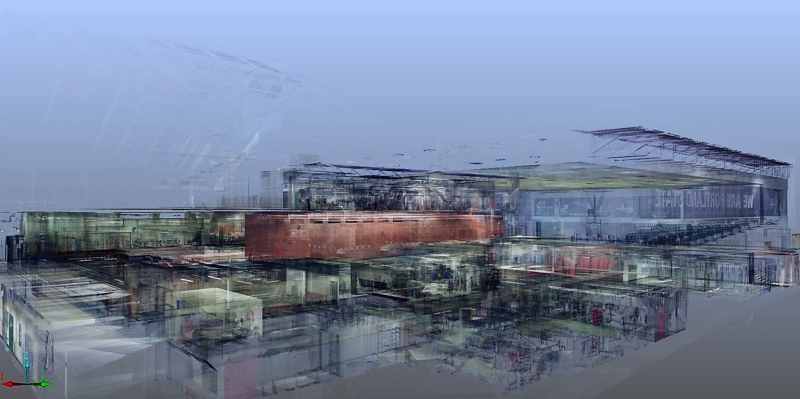
City point cloud model
It all begins in the field…or in the office?
Registering 3D scan data (scans) can be easy or extremely difficult. It’s not as simple as just learning the software or learning the field operations to make the registration go well. Rather, it’s a combination of the two. A new field tech cannot possibly know what goes on in the registration process and therefore would not be able to make sound, strategic decisions in the field. Conversely, a processing tech could not know what the field subject looks like, and therefore would likely have difficulty knowing how all the scans fit together if the automatic registration options offered by the registration software should fail them.
This can be a pain point for companies as they first adopt scan technology. Solving the problem requires a lot of communication in both the field and the office, which might include the field technician creating a rough map of where all the scans were taken from, which is a good practice anyway, especially when first learning this process. In some ways, you may find it easier to assign one or two persons to learn the technology in a more well-rounded fashion–that is, by learning both field and processing operations.
Tolerances, explained
When you scanning from multiple locations to create a larger, contiguous point cloud, it requires that the software find strategic ways to stitch all the scans to one another – accurately.
Depending on the project, the client may set tolerance requirements. These suggest that any measurement they take within your point cloud will be within this measurable tolerance. A current industry standard for scanning architecture with a terrestrial scanner (such as a FARO Focus3D or Leica P40) is about 4-6 mm or better over the entirety of the registered point cloud. Hand scanners may have tolerances at sub-millimeter levels, and aerial lidar is typically at centimeter tolerance levels.
In one way, these standards have been driven by scanner manufacturers, who have attempted to replicate what an architect or engineer could achieve with hand measurements, and then do just a little better, faster, and easier.
4-6mm or better sounds great, but it isn’t always easy to get that tight, especially with large scan projects requiring, say, hundreds or thousands of scans. In fact, the process has been so difficult and unpredictable with registration software, many companies continue to rely on survey control to place the scans. Some companies have had such bad experiences with registration software that they survey each and every target with a total station to align the scan data, thus bypassing the registration algorithms altogether.
This is unfortunate, expensive and time-consuming. Yet for some, it is better that than to deliver data that is inaccurate. Part of the pain point of registration software is that the algorithms, while exponentially more sophisticated than 7 years ago, still produce false positives (good registration reports, but clearly mis-registered scans). Ever had all green indicator lights in the registration report, but your data showed a toilet on the ceiling of the main lobby in your point cloud? Yeah, I don’t think that’s supposed to be there…
Editor’s note: This piece is the first of two parts.Look out next week for part two, which will include tips for better targeted registration and help understanding your registration report.


