The latest version of Gexcel’s lidar processing software makes a step forward into the processing of large datasets from various 3D sensors and in particular from mobile mapping systems.
Gexcel provides innovative software and instruments dedicated to the 3D geospatial and surveying/mapping market. Recently, Gexcel released V4.2 of Reconstructor, its full-processing software for lidar data coming from terrestrial, handheld, and mobile laser scanners and integrates point clouds coming from UAV and 3D imaging surveys. Reconstructor imports native scans raw format from a variety of 3D scanners, including DotProduct, FARO, Geomax, Riegl and others, and supports the import/export of point clouds in multiple open formats and a large number of 3D mesh formats.
The recent release of Reconstructor 4.2 makes a step forward into the processing of large datasets from various 3D sensors and in particular from mobile mapping systems, such as Gexcel’s own HERON backpack, a SLAM-based wearable indoor mobile mapping system. To handle the increasing amount of points, Reconstructor adopts two strategies: for data processing such as filtering, scan registration, meshing, the data are treated per scan, by using a mechanism that loads in the memory only what is necessary to process. For cloud rendering, Gexcel rewrote its rendering pipeline to dynamically visualize multiple points supported by the user’s graphic card.

For the latest Reconstructor release, Gexcel developed a HERON add-on, that can be added to Reconstructor 4.2 to enable a full workflow for georeferencing, managing and optimizing data coming from indoor mapping systems as Gexcel HERON or the LAS file coming from any mobile mapping device. The add-on allows the user to get specific commands to adjust the trajectory, navigate and retrace the survey with a 360° spherical view, to obtain completely measurable technical views that can be easily shared, and to produce videos. The new workflow enables georeferencing and adjusting point clouds generated with HERON, by constraining the model to already georeferenced point clouds from UAV, MMS or TLS, reducing the drift effects typical of the SLAM process.
Managing data from tunnels, underground and open-pit mines 3D surveys
Reconstructor 4.2 increases the capability to manage data from tunnels, underground and open-pit mines 3D surveys. The tools for mining and tunneling tasks are now organized in a single workflow-driven toolbar and so-called “recipe windows” guide the user to insert the ingredients in the proper order to achieve the result. Sequential cross-sections can now be extracted from point clouds or mesh models along a user-defined tunnel axis; these are displayed in a 2D viewer and linear, areas, and volume measures can be extracted. Tunnel cross-sections can now be exported in AutoCAD as polylines, point clouds and scaled orthographic views. Isolines and contours extraction from an open-pit mine model, a stockpile or a DEM has become easier thanks to a new, straightforward workflow.
Managing terrain models, buildings and infrastructures
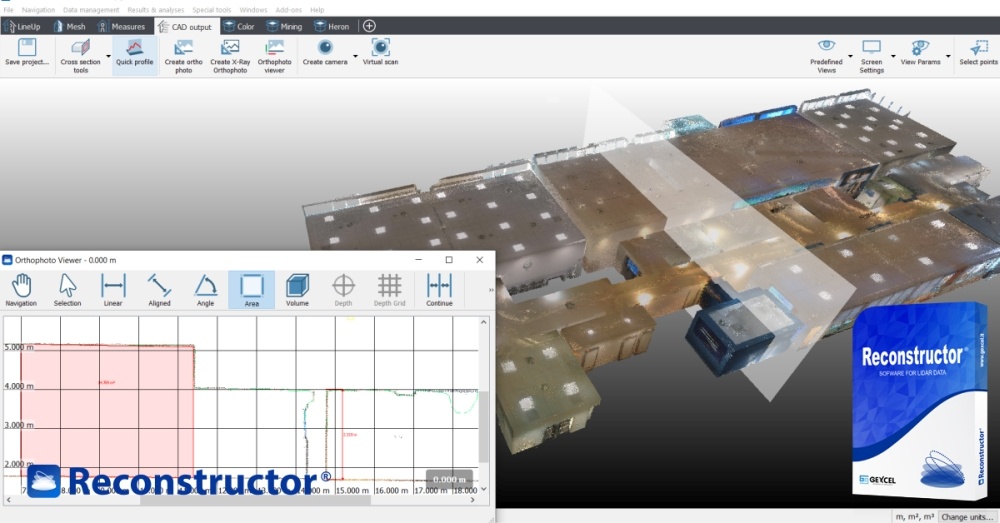
Often it is hard for the final client to access the results of a 3D survey. For this reason, Gexcel has introduced the concept of the BluePrint map, now improved with the new Spot height maps tool in Reconstructor 4.2. This tool enhances the capability to link the survey to the CAD and topographic world. The orthophotos/x-ray orthophotos can be used to quickly and efficiently create 2D maps or height maps of industrial plants, mines, buildings, and infrastructures: orthophoto/x-ray orthophoto items include a depth/elevation value which can be extracted in correspondence of specific points or according to a user-defined regular grid. The orthophoto can be visualized and measured by the free GoBlueprint tool, that can run on a tablet or low budget computers. Reconstructor 4.2 also presents a new robust and versatile DEM tool that allows creating digital elevation models starting from complex 3D point clouds. In Reconstructor 4.2, the extraction and display of a profile from 3D models, the extraction of measures, and the export to CAD are very simple and efficient thanks to the new Profile tool, ideal for terrain models, buildings or infrastructures.
Reconstructor 4.2 presents a set of tools to colorize point clouds with several color layers, which have been organized in a completely redesigned color mapping window. The tools allow users to classify point clouds and are ideal for vegetation removal. In combination with the Change detection tool (inspection), a histogram and custom color palette are provided. At the moment, the Reconstructor tools for vegetation detection are particularly dedicated to terrestrial laser scanners and the vegetation can be easily identified by analyzing the point roughness.