Contributed by Dr. Lorenz Lachauer
Mobile mapping systems promise to change the way we work, create new efficiencies, and enable unprecedented business models. This technology has made it an exciting time to be a surveyor, or one of their customers, but it has also raised some important questions.
What do laser scanning professionals (LSPs) really think of mobile mapping? Is it accurate enough for demanding projects? Does it have a permanent place in their workflows?
To answer these questions and others, we recently partnered with the leading 3D-tech publications to produce the State of Mobile Mapping survey. We gathered perspectives from laser scanning professionals worldwide and compiled their answers to extract data-driven insights that reveal the industry’s real take on mobile mapping.
And some of the findings might come as a surprise.
Top takeaways
You can find the whole report here. But here’s a quick overview of some of our biggest takeaways:
1. Mobile mapping is fast becoming a standard tool for laser scanning professionals
- 39% already own a handheld mobile mapper
- 21% are looking to purchase one in the next 12 months
- 28% own a backpack mobile mapper
- 23% are looking to purchase one in the next 12 months
2. Laser scanning professionals say hybrid workflows are the future
- 86% endorse the concept of using multiple capture methodologies on a single project
3. Myth busted: mobile mapping systems are accurate enough
- Only 26% said that mobile mapping isn’t accurate enough for their projects
4. Resolution and point cloud quality are more essential than you think
- Laser scanning professionals ranked resolution and quality as the most important attribute of a mobile scanner (76%), followed by accuracy (71%) and scanning speed (60%)
Today, it’s not just about accuracy
These insights tell a fascinating story. For a long time, the discussion about mobile mapping has focused on whether the technology was accurate enough for demanding professional workflows. Today, most professionals have determined that the best mobile mapping systems are accurate enough.
That’s why LSPs have moved on to ask, does this mobile mapping system produce high-resolution, high-quality point clouds?
I’d like to focus on the topic of point cloud quality a bit more since its value might not be entirely clear to those who are new to mobile mapping. I want to explain what point cloud quality is, talk about why professionals find point cloud quality just as important as accuracy (if not a little more), and then explore why it’s so difficult to achieve.
What is point cloud quality, and why does it matter?
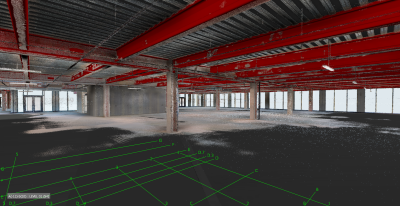
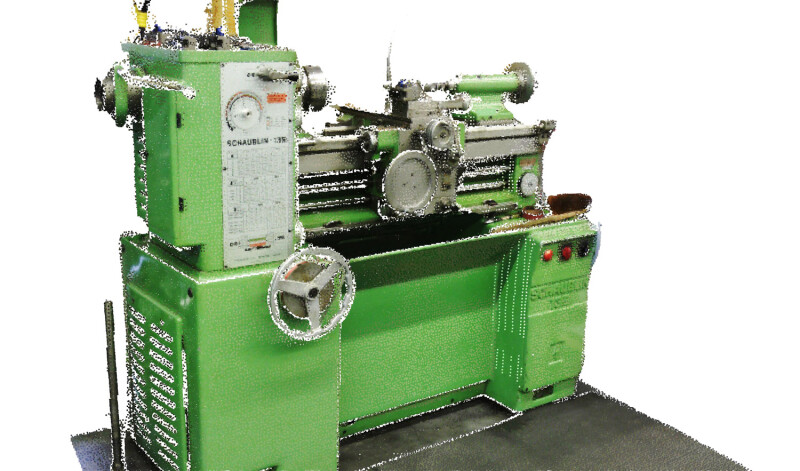
Point cloud quality usually refers to three different factors: the “sharpness” vs. “noisiness” in section view, how realistic the coloring is, and the even or uneven distribution of points on a surface.
Quality is important in professional applications because a low-quality point cloud will look “fuzzy” around the edges or “stripey”, making it difficult for viewers to discern important elements in the scan. No matter the accuracy of your point cloud, low quality will cause problems when picking out fine geometric details—for instance, if you are modeling the profile of a door frame.
That’s why it’s crucial to find a system that produces high-quality data. You’ll need a point cloud that shows fine geometric detail if you want to use your mobile mapping system for 2D drafting or 3D modeling of as-built conditions, produce visualization and simulation, perform up-close inspection, generate “as-is” depictions, and so on.
There is one more problem with low-quality point clouds. In addition to looking fuzzy, these data sets will lack uniformity, giving viewers an impression of poor accuracy and precision that can call the data itself into question. Your clients will find it easier to trust the accuracy and precision of a high-quality point cloud—and in turn, the quality of your work.
Why is high quality so hard to achieve in mobile mapping?
In terrestrial scanning, point cloud quality is largely a function of hardware specifications. Include a properly specified lidar sensor in the device, calibrate your hardware well, and it will be capable of capturing high-quality data. In mobile mapping, the story is more complex.

In contrast to terrestrial scanning, mobile mapping uses significant data processing to produce a final point cloud. As you likely know, these scanners rely on simultaneous localization and mapping (SLAM) technology, which enables you to walk with the mobile mapping system by aligning all the points properly in 3D space.
Mobile mapping systems also use a number of post-processing technologies to clean up the data after capture, and each of these stages has a huge effect on the quality of the final point cloud. The SLAM must align the points precisely and accurately in space. The noise reduction algorithm must remove “bad” points but leave the “good” ones. The filtering should remove people, for instance, but not the nearby windows or walls.
All of these technologies need to work well on their own—and as a collection—for a mobile mapping system to produce high-quality data. A high-quality point cloud is representative of the mobile mapper’s quality at every level, and it doesn’t happen by accident.
That’s why NavVis is particularly proud of our mobile mapping systems, like NavVis VLX and NavVis M6. In addition to offering high accuracy and speed, we have put great effort into producing the high-quality data that our users need for their most demanding applications.
Wrapping up
To get more insights like this and to access more information about the state of mobile mapping, including user demographics, the most common applications, and common barriers to adoption, download the full report here.
 About the author: Dr. Lorenz Lachauer is the Head of Solutions at NavVis. Dr. Lachauer leads a team of industry experts focusing on the verticals Surveying & Mapping, AEC (Architecture, Engineering & Construction), and Manufacturing. Before joining NavVis, he worked at Nemetschek Allplan as leading product manager for their Computer-Aided Design (CAD) and Building Information Modeling (BIM) software. Lorenz studied Architecture and holds a PhD from ETH Zurich.
About the author: Dr. Lorenz Lachauer is the Head of Solutions at NavVis. Dr. Lachauer leads a team of industry experts focusing on the verticals Surveying & Mapping, AEC (Architecture, Engineering & Construction), and Manufacturing. Before joining NavVis, he worked at Nemetschek Allplan as leading product manager for their Computer-Aided Design (CAD) and Building Information Modeling (BIM) software. Lorenz studied Architecture and holds a PhD from ETH Zurich.