

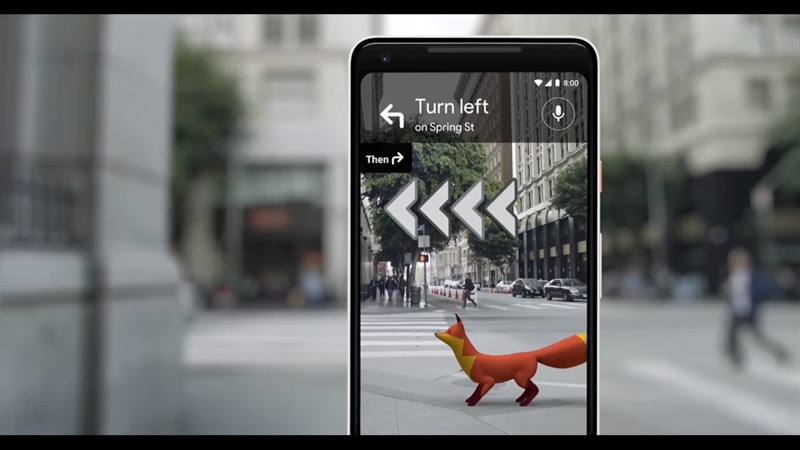
Google just held its yearly developer event in San Francisco, called Google I/O, where it introduced many new features for Google Maps, using AR and computer vision. With regards to augmented reality, Google announced (not for the first time) a new AR navigation service, using the camera and GPS of a smartphone to give the user turn-by-turn walking directions.
Google calls this service Visual Positioning System (VPS), referring to the smartphone camera that is used to “recognize” the surroundings, which is matched with Google´s extensive collection of street view imagery in order to define the user´s location. This service will be useful in combination with a series of Yelp-like applications new to Google Maps that use machine learning to give users recommendations for restaurants and bars based on their own and other people´s Google ratings.

Google Lens offers an augmented reality experience as it recognizes buildings.
But Google has more plans for AR, for example, using computer vision to identify real-life objects such as buildings and plants. This feature was previously integrated into Google Photos, but will now be released on a number of Android phones so that it works with a smartphone camera. The service also can recognize and copy printed text to a phone. Finally, Google’s ARCore SDK for developing AR experiences on smartphones, has been expanded for building multiplayer AR experiences that can be shared across different devices.
Competition
Just after Google announced its new VPS, a new competitor of this service announced itself: a tech startup called Fantasmo, based in Santa Monica, California. Fantasmo develops tools for creating 3D indoor and outdoor maps, that can be used for navigation by individuals and robots. With a mobile app named Terra Explorer, georeferenced photos are collected and are turned into a 3D point cloud model on Fantasmo´s service. Next, distinct visible features in the point cloud are identified and packaged into a data format called CPS (Camera Position Standard). Point cloud and CPS files are stored in a geospatial database that can be accessed through Fantasmo´s SDK. A spatial map is downloaded when a user or robot accesses a particular area.

Fantasmo wants to offer hyper-accurate positioning using point clouds and photos
Fantasmo claims that their service is more accurate than any type of GPS-based navigation, as it compares photos to their CPS map file and define their position in the environment. Drift is corrected by continuously correcting the visual map to the maintained precise positioning. The company’s approach to privacy is different than Google´s, as data is owned by those who collect it. Use of Fantasmo’s data collection app is free, but it charges for commercial access and premium features in TerraOS, an open-sourced operating system that contains the map data.
It is doubtful if the company can make a big change in public spaces compared to Google, but for private spaces such as stores, this could be an interesting alternative to mapping and navigation services of its competitor(s


