Contributed by Blue Marble Geographics
With the latest release of Global Mapper®, version 23, Blue Marble Geographics adds a new way to address not just point cloud classification, but so much more with the release of Global Mapper Pro®. While Global Mapper base is still available, the Pro version extends the applications capabilities with advanced terrain analysis tools, new point cloud processing options, and access to all the point cloud processing tools previously found in the Lidar Module (now retired), including automatic point cloud classification and the Pixels to Points® tool for processing drone collected imagery. Long term users have nothing to fear, Global Mapper Pro picks up where the Lidar Module left off and will continue to be one of the industry leading lidar processing tools available.
To that end, Blue Marble Geographics continues to develop new point cloud analysis tools in Global Mapper Pro, with the latest addition being a  Segmentation by Spectral Graph Partitioning tool used to identify unique segments of points based on user input parameters. Adding to the existing suite of automatic classification and extraction tools in the program, this new functionality can be used for semi-automated classification. Instead of directly applying a class to analyzed points, the Point Cloud Segmentation tool applies a segment identification value to each identified cluster of returns.
Segmentation by Spectral Graph Partitioning tool used to identify unique segments of points based on user input parameters. Adding to the existing suite of automatic classification and extraction tools in the program, this new functionality can be used for semi-automated classification. Instead of directly applying a class to analyzed points, the Point Cloud Segmentation tool applies a segment identification value to each identified cluster of returns.
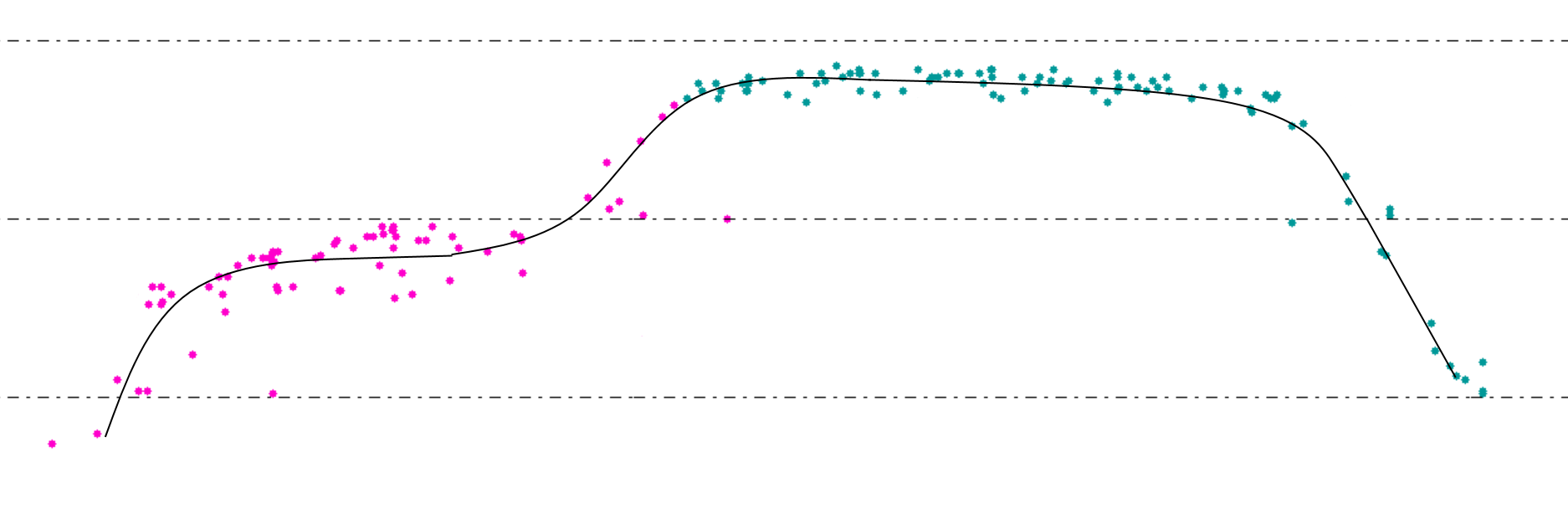
The Segmentation tool in Global Mapper Pro is executed in two steps; first, calculating a point-to-point similarity measure based on an attribute evaluation, and then using the similarity statistics to divide the returns into unique clusters in order to identify distinct features in the data. The characteristics of each point return used in the analysis depend on the available point attributes, and what the user wishes to consider in the analysis. With applications ranging from ground identification to roof plane and car identification, the Segmentation tool applies a unique segment ID to each discovered feature. Point clouds can then be visualized by segment ID to clearly see and further edit and analyze the identified features.
Attribute Evaluation
As the first step of the segmentation analysis, an attribute evaluation is done to determine point-to-point similarity. To customize this section of the analysis, users can choose and weight attribute values that will be considered in the process. This level of user control over the tool makes Global Mapper Pro’s Point Cloud Segmentation a classification tool for incredibly diverse purposes.
Attributes available for consideration in the similarity calculation include position, normal, intensity, return number, and curvature. Position, referring to the coordinate position of the return, is the only attribute always considered in this analysis. This ensures the identified segments of points will be contiguous, representing a single feature or clumped together features.
While not all these attributes are available for all point clouds, for example photo-derived point clouds do not typically have a return number or intensity, the Segmentation analysis settings allow users to choose and weight the characteristics that should be considered.
Segmentation
After analyzing point similarity, Global Mapper Pro breaks the points into their clusters, or segments based on the determined similarity and user input partitioning values. The parameters for dividing the segments include a guide for segment size with the Minimum Number of Points in a Segment, and some options more directly related to the similarity analysis, such as Connectivity Threshold and Maximum Number of Standard Deviations. If curvature is used in the attribute evaluation it is examined again as segments are identified with a Maximum Curvature parameter setting the allowed amount of curvature within a single segment.
How can Segmentation analysis be used?
Point cloud segmentation analysis in Global Mapper can be an incredibly versatile tool. Since a classification is not applied to points after executing this tool, it allows the identification of features with opportunities to classify the features after identifying.
Identifying Ground
Using segmentation to identify ground points can work beyond Global Mapper Pro’s automatic ground classification tool as more attributes can be considered. To identify ground in this example, the segmentation tool is used and position, intensity, and curvature values are considered. Segmentation options requiring larger segments with low conductivity and low curvature thresholds, large segments representing ground and flat building roofs are identified.
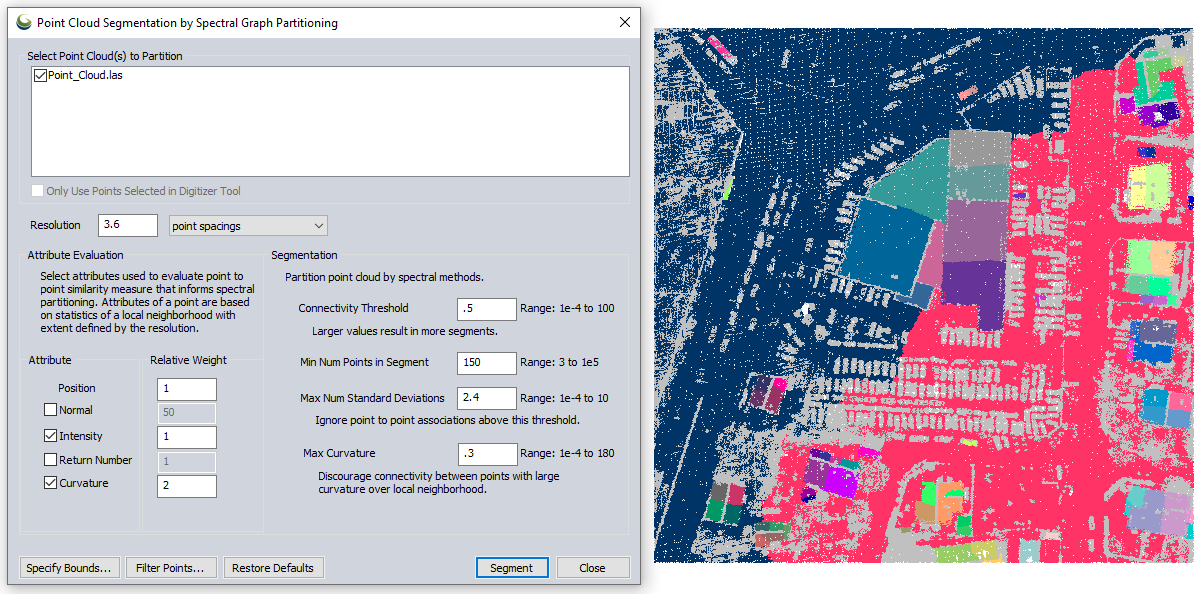
After running the Segmentation tool, the dialog box will remain open, and the Lidar Draw Mode will automatically change to Draw Lidar by Segment ID. This process will show the point cloud by the newly created and applied segment ID values.
Pairing with the segmentation updates, a Select Segment mode provides the ability to select the identified features by automatically selecting all points with an equal segment ID value. Easy selection of whole segments aids in editing or classification of the identified segments. With the ground representing segments of points selected, they are manually classified as ground.

Identifying Cars
Now that a large portion of the points have been identified and classified as ground, these points can be filtered, and the focus can be put on smaller features in the dataset. In this particular point cloud a parking lot of cars is clearly captured, and theSegmentation tool in Global Mapper Pro can be used to find individual car features.
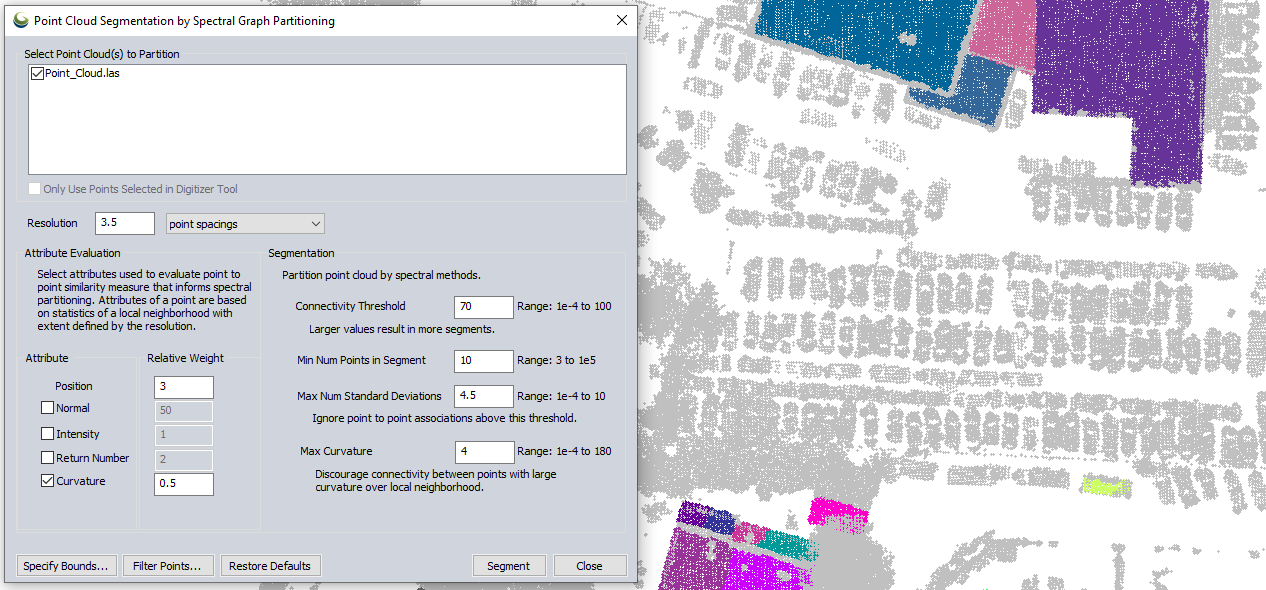
Using a point cloud filter in Global Mapper Pro before working in the Point Cloud Segmentation tool again ensures ground classified points will be ignored and only the unclassified points will be considered in the segmentation analysis. Using point position and curvature, and tightening the connectivity threshold results in identified segments representing individual cars in this point cloud. With unique segments representing cars, these clusters can be selected with the Select Segment tool to be easily classified or deleted.

The Point Cloud Segmentation tool in Global Mapper Pro provides opportunities to customize the identification of features in order to classify or remove them when processing a point cloud. Combined with the Select Segment tool, segmentation greatly expands the classification capabilities of the program and the efficiency of manual classification.





