PORTLAND, Ore. – Urban Robotics Inc., a provider of 3D imaging sensors, software and algorithms, today announced it is making its highly scalable, spatially searchable and colorized 3D octree-based point cloud format available to the Point Cloud Library (PCL) community.
PCL is a standalone, large scale, open source project for 3D point cloud processing. Willow Garage, of Menlo Park, Calif., launched PCL in March, to help accelerate 3D algorithmic work related to robotic applications, according to a press release. It is free for research and commercial use. The addition of Urban Robotics’ software code to PCL lays the foundation for the creation of a standardized format for large-scale 3D applications, according to the companies.
Urban Robotics developed its octree-based format to efficiently store and manage point cloud data, and to address challenges related to the rapid processing of massive 3D images during daily operations.
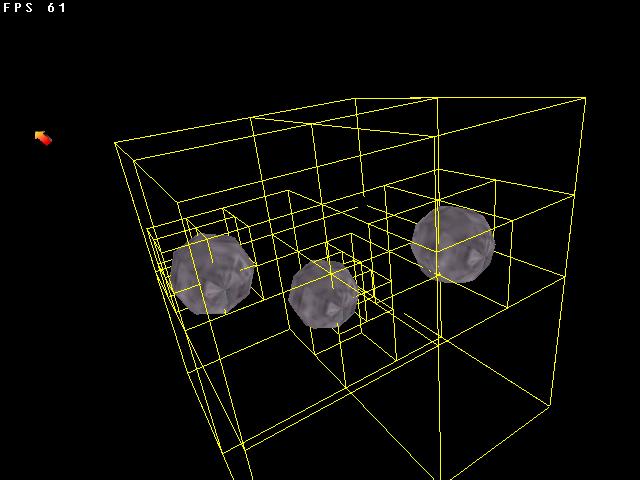
“The main challenge with supported LAS and XYZ point cloud file formats is that they do not scale efficiently. Octree data structures provide an elegant way to offer level of detail support that efficiently scales to extremely large datasets,” said Geoff Peters, CEO, Urban Robotics, in a statement.
Octree formats also allow 3D point cloud data to be spatially indexed and queried, as well as provide the ability to encode image color and other metadata. “Individual companies are challenged by massive point clouds and, as a result, end up developing proprietary data structures to support 3D visualization and manipulation of these large data sets,” said Radu Rusu, research scientist at Willow Garage and PCL founder, in a statement. “This fragmented approach to point cloud data is holding back the industry from developing truly revolutionary products.”
Urban Robotics will work with Willow Garage to port its octree-based format to the PCL framework in early 2012.
“We hope our contribution to PCL will help establish open standards not just for LIDAR data, but also for the emerging dense and massive 3D datasets extracted from standard imagery,” said Peters.
The Point Cloud Library is supported by large numbers of engineers, scientists and organizations around the world. “Urban Robotics’ octree-based format is a critical component that will allow innovative companies to focus on 3D product development versus core component development,” said Rusu.