Last week’s SparView introduced the operating principles of time-of-flight measurement and phase-based measurement. This week we’re going to have a look at where each type of device is best applied. One type of device is not better than the other, any more than a screwdriver is better than a hammer, but each excels in different ways.
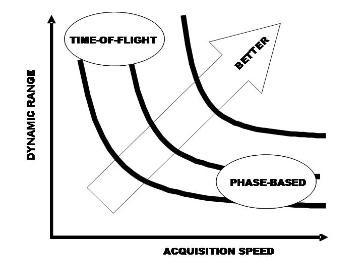
One main tradeoff between time-of-flight scanners and phase-based scanners is between speed of acquisition and dynamic range. Time-of flight devices typically capture data at a rate between hundreds and thousands of points per second. By contrast, phase-based devices capture hundreds of thousands of points per second. Phase-based
devices are faster, and in many applications this makes them the tool of choice.
On the other hand, time-of-flight devices have a much longer dynamic range of useful measurement than phase-based devices. Time-of-flight devices can provide useful data from as close in as a meter, out to a kilometer. Time-of-flight devices are the clear favorite when the ranges to be measured are long. My favorite example of this comes from the story we reported a few weeks ago about the New York Power Authority project executed by TVGA and Northway-Photomap, where the scanner was in Canada and the scanned subject was across the Niagara River in the United States.
Why the technical limitations of each type?
Why can’t TOF scanner manufacturers just increase the laser pulse rate to achieve the same data collection speeds as phase-based scanners? One reason is that in a TOF device, each laser pulse must have time to return to the detector before the next one is sent out. If the signal is making a 2-kilometer round trip, the speed of light would limit the signal
rate to 150,000 pulses per second, even before allowing for latency in the detector. Also, increasing the pulse rate would likely require the use of a different class of laser, changing how the device is classified in terms of eye safety – a big issue affecting acceptance of laser scanners in some industries.
Conversely, why can’t a phase-based scanner shoot further? The first reason is that the continuous signal would have to be unacceptably powerful. Another reason is that the modulation waveform would become very long, and accuracy would suffer over longer ranges, apart from issues such as very high signal-to-noise ratios.
Some service providers are choosing both
Some forward-thinking service providers have decided that having both types of tools is the way to go. One is Dr. Dennis Hirota, president of Sam O. Hirota, Inc., Honolulu. “We researched the capabilities of both time-of-flight scanners and phase-based scanners,” he reports, “and concluded that phase-based devices were most appropriate for shorter-
range, higher-definition work, particularly where speed is an issue, and that time-of-flight scanners were better when longer-range measurement is important. They’re really very different technologies.”
Another is Don Bowen, Jr., PLS, principal of Meridian Associates, Danvers, MA. “We have succeeded in the use of laser scanning for a range of civil applications which include volume analysis, structural steel documentation, linear route surveys of roads, as well as exterior building Another is Don Bowen, Jr., PLS, principal of Meridian Associates,
Danvers, MA. “We have succeeded in the use of laser scanning for a range of civil applications which include volume analysis, structural steel documentation, linear route surveys of roads, as well as exterior building architecture, non-construction-related subjects for archiving, and historic preservation,” he reports. “Since 2001 we have owned and successfully utilized a time-of-flight scanner, and recently conducted our own intensive evaluation of phase-based devices. Recently we oversaw several demonstration projects with phase-based technology and expect to acquire the equipment in the very near future.” The reason? “At the current state of technology, no single platform appears to satisfy the wide range of interests and applications of 3D laser scanning. Project-driven design or construction specifications determine whether TOF or phase-based technology should be used. Based on our experience, phase-based scanning is more applicable in the plant and mechanical areas, where the desired level of accuracy exceeds current TOF equipment manufacturers’ specifications. For example, failure and deformation analysis are situations where the accuracy of phase-based scanners is preferable to TOF devices.”
Matt Craig, project engineer in KBR’s Operational Excellence group and an expert in work processes for field data acquisition, believes “each technology has its own applications. It depends on what the project requirements are. Phased-based scanners give you the information you need at short-range distances, collect the information very fast, and generate photographic-quality images from the scan data. The data sets created are very compute-intensive from the standpoint of both storage and manipulation, but the deliverable generated is very valuable in areas that are heavily congested. Time-of-flight technologies provide advantages in longer-range applications, even though scan rates are slower. Both technologies are very effective as long as they are being used for the right application.”Comparative utility also depends on downstream work process
Of course, the comparative utility of these devices is determined not only by the acquisition speed and dynamic range – much depends on the downstream work process as well. Phase-based devices produce great gobs of data – Graham Dalton, technical director of Z+F, reported a data set of 45 billion points created from 900 scans of an automotive facility.
As 100,000 points imported into most CAD systems is sufficient to bring them to their knees, getting full value from a phase-based tool and the dense data it generates demands careful consideration of post-processing and subsequent workflow.
Is extracting 2D deliverables easier with TOF devices?
Is the path to extracting 2D deliverables easier with TOF devices? We found that opinion varies widely. Says Hirota, “The software is obviously the key to accomplishing the 3D-to-2D task. The question to be answered is whether software developed for TOF devices can handle the significantly greater data volumes of the phased-based devices. The
closer point spacing of phase-based data may make it easier for some methods of automated tracking, and may also confuse others, which rely on the wider point spacing of TOF data.”
According to KBR’s Craig, “Data from TOF scanners tends to yield cleaner 2D sections than data from phase-based devices, but the difference can be eliminated by the filtering mechanisms associated with phase-based technology. With that, I think there’s rarely a big difference between the two.”
Derrel Shaffer, manager of BE&K’s As-Built Services Group, reports, “Based on my experience I do not think this is a practical option at this time. Current software doesn’t permit automatic extraction of quality 2D CAD drawings directly from point-cloud data. The result is generally hazy, grainy, broken and non-orthogonal – basically low-quality. Another thing
to consider is that most engineering companies and plant owners have strict CAD quality control requirements for deliverables; everything must be assigned specific layers/levels, line color and style/type, and generally requires the use of standard blocks/cells. Direct profile extraction cannot meet these requirements.”
“So based on these shortcomings,” Shaffer explains, “we use one of the following work processes: (1) create a 3D model from the scan data; then extract the plan, elevations and cross-sections from the model; (2) use CloudWorx, then manually trace lines over the profile; we try to make them orthogonal whenever possible; or (3) take measurements from the cloud data and independently create a 2D CAD drawing. The designer or engineer chooses the work process that works best for his particular situation. In summary, it’s my opinion any of these methods will work equally well with either type of data, TOF or phase-based. As to which technology to use, again it comes down to site conditions; the amount of congestion and required range dictate the best technology to use.”
Is extracting 2D deliverables easier with TOF devices?
Jim Flint, vice president of Bohannan Huston, Inc., concurs. “I can’t say it’s easier to extract 2D data from one kind of laser data than the other.” Flint is careful to note Bohannan Huston has not yet used a phase-based scanner on a project, though it has experimented with data from such devices and plans to use one on an upcoming job. “In our workflows we don’t spend much time creating 2D data from cross-sections of point clouds – vector lines extracted directly from laser data would be too jagged and have too many vertices to be useful,” he explains. “Instead we extract a 3D model from the points, and use that to generate 2D data. In these workflows, the more data, the better, of course. But once the laser data is in our software – we use Cyclone and PolyWorks – whether it’s from a phase-based or TOF device is irrelevant. On the other hand, when we need to create a digital terrain model, we take the laser data and resample it to remove some of the surface points in order to make the DTM a more manageable size – in that case, you could argue that TOF scanners are better because less resampling is required. But again, once the data is passed to the application – InRoads, GeoPak or whatever – then how the point cloud was generated is of little relevance. So overall, I can’t say either type of scanner is better or worse for extracting 2D deliverables.”
On the other hand, Eric Hoffman, CEO of Quantapoint, Inc., Pittsburgh, PA, reports, “We have performed over 500 projects containing some of the most important buildings in the country by extracting 2D data directly from point clouds. Our resulting drawings have been praised over and over again for their clarity and completeness.” He adds, “I would never
do a 2D building drawing any other way now that we have the experience we do.” Noting that laser scanning “consists of three measurements – distance, elevation, and azimuth,” Hoffman says that “the other two measurements are just as critical as the distance measurement and are NOT dependent on the type of laser technology used but have a huge impact on the usability of the data.” He adds, “I believe that the path to extracting data has nothing to do with the laser technology but all to do with the spatial resolution of the data (the other two axes of motion). The key to the entire discussion is what is the measurement accuracy you require. As I continually try to teach people, the measurement accuracy of your data has more to do with the angular spacing between the points than the laser technology used.”
Measurement accuracy of laser scanning tools is an issue that deserves its own article. For now, suffice it to say that accuracy is weakly dependent, if at all, on which laser technology is used. We’ll revisit this subject in a future SparView.
Cost
Of course, no comparative discussion of phase-based versus time-of-flight tools can ignore cost. List prices for phase-based scanners range from $80,000 to $165,000, while time-of-flight devices list for $31,500 to $150,000. (Prices for most TOF devices are in the upper two-thirds of this range.) As-sold prices vary according to hardware configuration, software and maintenance options.
Time-of-flight devices come from Callidus, I-SiTE, Leica, MDL, Optech, Riegl and Trimble, and phase-based devices come from iQvolution, Visi Image and Z+F. Z+F also supplies the phase-based device that Leica OEMs as HDS 4500. Quantapoint scanners are also phase-based measurement devices.