

In Pix4D’s latest newsletter, the drone mapping and photogrammetry solution provider announced it has developed a new industry standard for the exchange of photogrammetry standards called the Open Photogrammetry Standard (OPF). The standard is fully open and free, enabling data collaboration between products from different vendors.
Standard specification and Python library
The standard was developed to meet the market demand for a standardized and open format for storing and sharing photogrammetric data. Without such a standard, collaboration between stakeholders and different software programs is difficult. Pix4D states the standard is non-proprietary, open, flexible, and extensible. The standard consists of a specification that is based on simple JSON structures. A single project file functions as a container with links to the other associated files.
This specification documentation is available on GitHub along with a Python library to read, write, and manipulate OPF objects. Currently, the standard is compatible with PIX4Dmatic, Pix4D’s photogrammetry software for drone and terrestrial mapping. This means the software enables the import and export of OPF objects. This capability will be extended to other company products in the future. Vendor-specific extensions can be proposed through the standard’s GitHub space. This space is also meant for feedback, exchange for user experiences, and collaboration on the Python tool.
Potential user base
The OPF standard is meant to be used by researchers, academics, and professionals working with digital images and are looking for a standardized way to manage and share photogrammetry projects. The main benefits for researchers are better data access and avoiding compatibility issues when working with data from different vendors. They will also spend less converting data and thus save time.
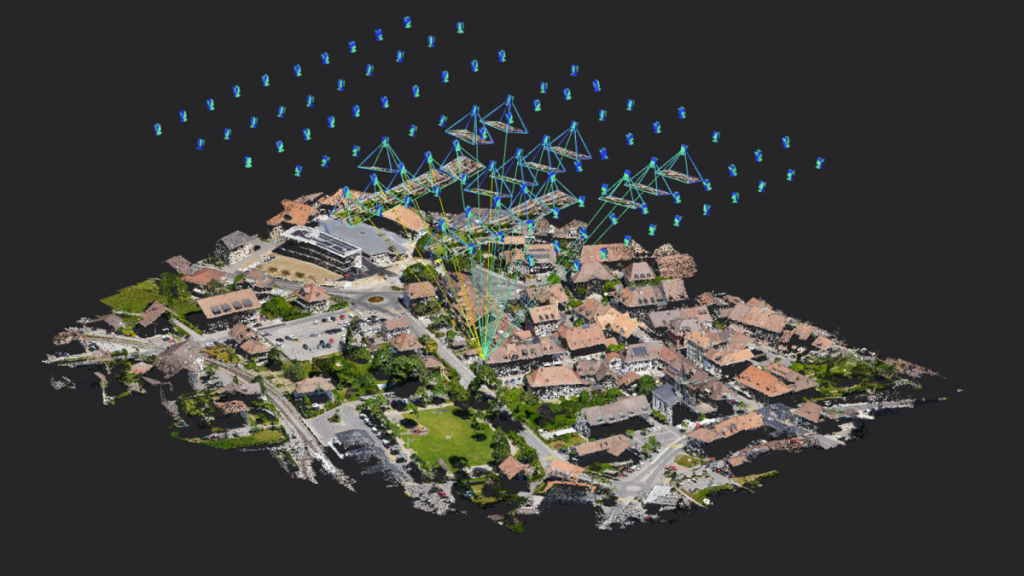
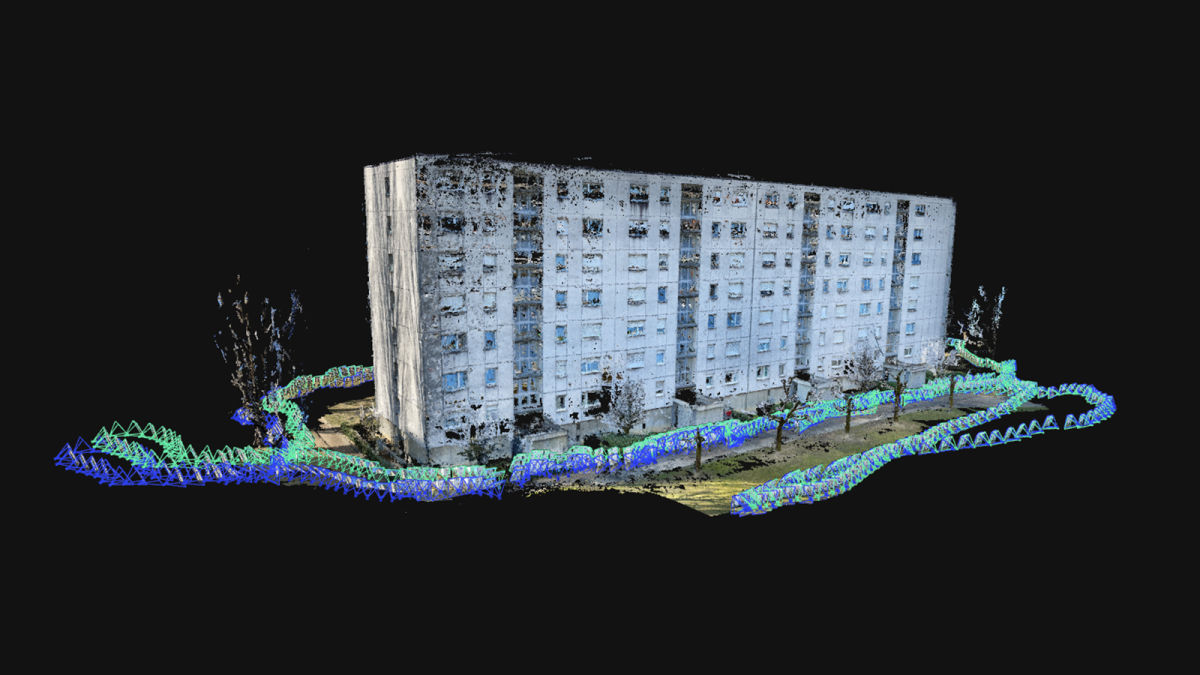
OPF stores all data related to a reconstructed 3D model made with photogrammetry, including both inputs and outputs of the photogrammetry model such as the cameras used, their parameters, coordinate reference system and control points. The output data includes info about the camera calibration and the dense reconstructed point cloud.
Community feedback
When announcing this new standard, Pix4D asked for feedback on the initiative. In an online discussion on the website of OpenDroneMap (ODM), some additional information was given by a Pix4D representative following the announcement of the new OPF standard and subsequent feedback from the ODM community. OpenDroneMap is an open-source photogrammetry toolkit to process aerial imagery into maps and 3D models. This community could be a potential user community of the new standard.
The Pix4D representative stated the publication of the specification is only the first step, and that it will be extended in the future so that for example added support for other features will be added. Currently the company is working on OPF extensions such as processing areas, depth maps which are computed or from depth sensors, and planes. It will be interesting to see how the standard itself will be developed further, and how the different user communities can participate in this process.


