
There are a number of holy grails within the 3D-scanning community, and one of them is a solution for automatically tracking changes to your asset.
Right now, you can send out a worker to scan regularly and then run a change-detection process on the data sets to isolate the ways your asset has changed since the last scan. Or, you can wait until someone—a field worker, maybe—notices a difference in the asset, then you perform a scan and assess the extent of the change. It doesn’t take Henry Ford to see that this process could be made more efficient.
Robots offer a great means for regular scanning without human intervention, but they’re not totally developed yet. One of the great unsolved problems has been building a robot that can easily navigate the obstacles it encounters when moving around an asset.
https://vimeo.com/158504174
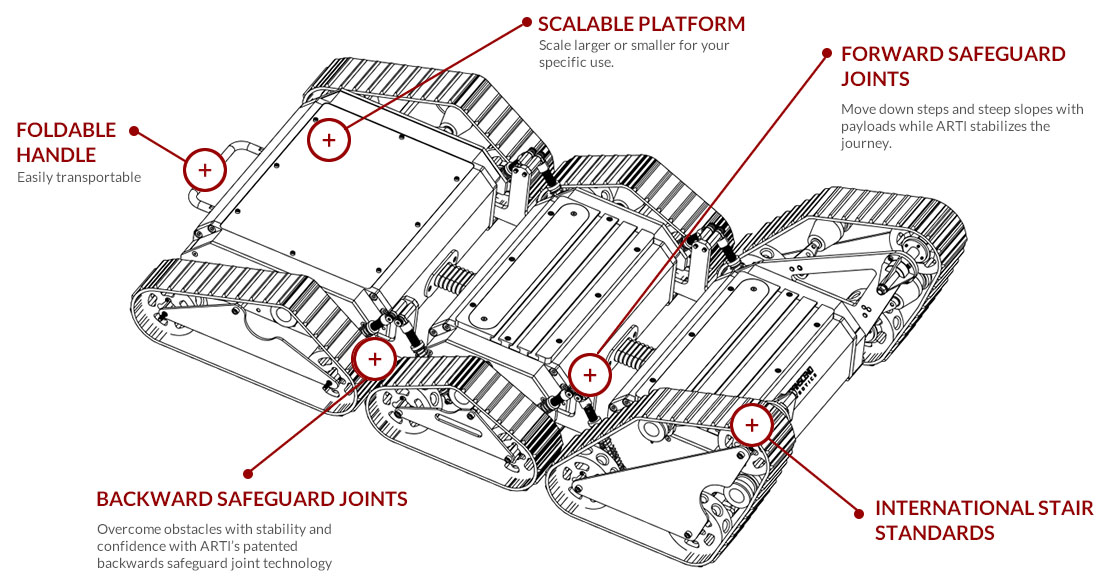
Enter Transcend Robotic’s ARTI robotic platform. As CEO Philip Walker explained to SPAR, the solution has been developed to provide quick and simple “robotics mobility over stairs and other obstacles (palettes, concrete bags, etc) to enable 3D scanning for documentation purposes.”
Currently, the device is designed to be piloted remotely by a live human operator. “All you need to do to navigate a construction site is move ARTI forward,” says Walker. The design of the ARTI will allow it to move over whatever obstacles happen to be in your way.
The ARTI robot is designed so that users can simply mount a third-party 3D scanning or photogrammetry rig (the type you might already own) on top. Once that’s done, the ARTI is fully equipped for surveying, MEP, and QA/QC ground truthing for a project.
Though it certainly stands to make more routine scanning easier, the device also presents a solution for indoor and outdoor scanning in dangerous situations.


