
FME 2012 augments lidar capabilities, but no e57 yet
VANCOUVER – Last year at this time, Safe Software rolled out support for lidar data for the first time in its FME spatial data transformation product. The result? “The majority of our users were pretty happy and we mostly nailed it the first time,” said Dale Lutz, co-founder and VP of development at Safe.
But there are always improvements to be made. With the release of FME 2012, Safe believes it has tuned its abilities to better address customer needs, said Lutz.
“The main feedback was about performance in the face of almost an order of magnitude larger files than we first thought we’d have to deal with – the billion-point files. Being able to tile them and so on,” said Lutz. While only maybe 10 percent of users were handling point clouds this large, it was enough that “we went back and implemented a much more fancy internal set of tricks to speed things up.”
Safe has also added support for a number of data types and coordinate systems, including especially ECEF (“that was more important than most,” Lutz said); added the ability to load files into Oracle Point Cloud; and laid the foundation for working with ArcGIS 10.1 when it’s widely released later this year, greasing the skids for letting users work with more points faster.
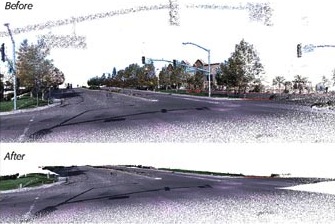
Lutz’s favorite add on? The new colorization capabilities.
“You can take older, pre 1.2 LAS files and drape them with orthophotos and get colorized lidar,” he said. “And that plays to our strengths to integrate data from multiple sources at a time.”
He was also pleased to be able to incorporate Martin Isenburg’s LAZ compression standard, which allows users to export LAS files as small as 10 percent their original size.
“The key was, he cleared up the licensing,” Lutz said. “If you go to his web site, it’s quite astonishing the significant organizations that have made their data available in that format.”
“He’s truly a genius kind of guy,” Lutz said of Isenburg, who supplies the code for free. “Maybe a little like the Mozart of lidar.”
So, what’s missing? Well, first and foremost, no support for the ASTM e57 standard. However, “I’m very pleased to tell you that three doors down the hall people are working on that right now,” Lutz said. “I just paid the money and bought the official spec the other day and that’s under way right now. We might even roll that out as a service pack since I don’t want to wait a whole year.”
Frankly, he said, Safe hasn’t had a single customer ask about working with e57 standard data, but “we don’t want to be left behind,” he said. “We want to plant a flag, say we do e57, and it might help us support more vendors’ sensors in the short term,” rather than having to support their proprietary outputs.
More long term, Lutz said to look for more interesting ways to combine lidar data with other data to infuse the lidar with more information, maybe, for example, allowing for the overlay of point clouds on vectors. “I want to be able to do math on the components of the points,” he said, “to run arbitrary expressions across the whole point cloud … opening up more powerful processing by combining the power of two different data types.”
Further, he knows that with the uptick in use of photogrammetry, he can expect more information to be associated with the point cloud coming in. Beyond XYZ and RGB there might be data associated with temperature, light spectrum data, or something else a sensor hasn’t thought of yet.
“I think that’s the area where we need to do some architectural change” to the software, Lutz said. But maybe don’t expect that by 2013.


