

If you’d like even more proof that people are inventing new applications for 3D laser scanners every day, I give you this story about researchers using laser scanning to map rat whiskers. What this says to me is that it’s becoming more and more common for people in the business of curiosity to default to: “I know, let’s scan it!” This is a good thing.
For those of us in the industry, this kind of inclination might not seem so foreign, but without broad mainstream understanding of the technology’s potential, such a default isn’t possible. You can’t think of trying something you don’t know about in the first place. (This, actually, might be one of the first missions of the new 3DPA – a broad mainstream education campaign using YouTube and other social media to spread the gospel relatively inexpensively.)
In this instance, researchers are trying to better understand the way that rats use 60 independently controlled whiskers to understand their surroundings. If this ability can be mimicked digitally, we might have ourselves some smarter robots, goes the thinking.
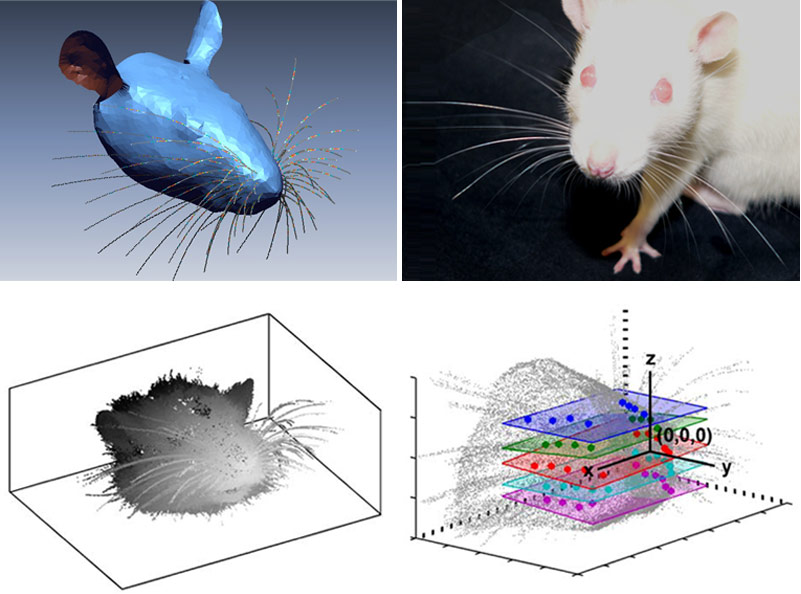
Hundreds of researchers study whisking, and to help them out, Hartmann and her colleagues decided to construct a 3D computer model of the rats’ whiskers, which they describe online today in PLoS Computational Biology. The team placed rats in a 3D laser scanner and scanned their noses to map out the exact morphology of their whiskers and cheeks. By applying previous knowledge of how a rat whisks in different situations, they created a computational model that realistically simulates real rats’ whiskery explorations.
Now, it would seem to me that you’d have to have yourself a pretty heavily sedated rat to pull that off (actually, the rats were euthanized with a lethal dose of pentobarbital… and then decapitated), but it’s pretty cool that they had the idea in the first place. (Also, I must admit, I enjoy the use of the verb “to whisk” in this manner. Previously, I’d only seen it used in cooking applications. The adjective “whiskery” is solid, too, I must say.) After reading far too much of the original article in Computational Biology, I discovered the actual method and materials for performing the scanning:
A Surveyor DS-3040 3D laser scanner (Laser Design Incorporated) was used for the 3D scans. The final scanner output was a finely digitized 3D point cloud (20 micron volumetric accuracy) … The complete point cloud – including both head and whiskers – was imported into the software package RAPIDFORM XOR. Within this software package, data points corresponding to each macrovibrissae [ed. note: this is the sciency term for “whisker”] were extracted from the point cloud. An example of an extracted whisker is shown in Figure 13A [find a point cloud of a whisker, I mean macrovibrissae, here]. The extraction process involved manual rotation of the 3D scanned image to visually determine the set of points that clearly belonged to each whisker through all angles of rotation. The whisker base-point was then identified as the centroid of a small number of points (typically 8–20) on the mystacial pad that rotated the least relative to that identified macrovibrissa. Whisker identity was assigned using the well-known topographic arrangement of whiskers on the mystacial pad. In the case that two or more whiskers emerged from the same follicle (as occurred for approximately 10% of follicles), only the largest whisker was used. After manual extraction, the 3D points belonging to each macrovibrissa were exported to Matlab and a moving average (21-sample window) was used to smooth the shape.
Well, there you have it. In case you were interested in replicating that with some rats at home. But there’s a real point here: There are a seemingly unlimited number of professions and research fields that will find a use for 3D data capture – if they know enough to apply it.


