SLAM is pretty well established for use in robots and autonomous vehicles. The difficulty with the technology—which generates a map of a vehicle’s surroundings and locates the vehicle in that map at the same time—is that it takes a lot of processing power. Too much power, in fact, for the kind of small and swift drone that could fly through complex environments like a forest, or warehouse, or cityscape. There simply isn’t enough on-board processing capacity to handle the complex calculations.
That’s why researchers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) developed NanoMap. The system uses 3D depth sensors to perform navigation fast, enabling autonomous drones to reliably hit speeds of 20 mph through dense environments.
It differs from solutions like SLAM in that it doesn’t generate a holistic, complete map of the environment with certainty about the drone’s location. It leans into the uncertainty.
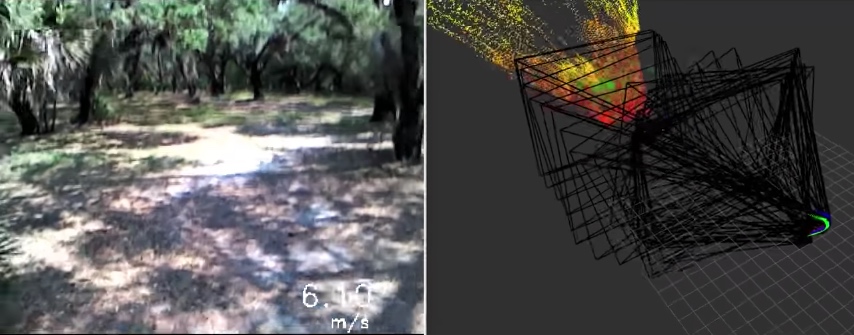
Practically speaking, the system uses its depth sensor to gather a series of views (something like 3D snapshots of its environment), with position uncertainty included. Next, it stores these views in memory. As grad student Peter Florence, lead author of a new paper on NanoMap, explains, “It’s kind of like saving all of the images you’ve seen of the world as a big tape in your head. For the drone to plan motions, it essentially goes back into time to think individually of all the different places that it was in.”
With NanoMap, the drone plans its movement through space by performing a search through the views it has already stored, looking for the “most-recent and therefore minimum-uncertainty” relative to the drone’s current view. In other words, the drone picks the stored view with the best information about the location of a nearby obstacle. This “lazy” approach processes data much, much faster than traditional mapping approaches, which try to locate the obstacle exactly in space.
Lead author Pete Florence explained to The Verge that NanoMap isn’t ideal for mapping applications (buy you already know that), but it could help make small drones much faster. “We have drones that can fly around now, but there’s nothing that’s as good as a hawk, for example, that can just blaze through a forest at top speeds,” says Florence.





