

A consistent theme in this blog series has been a personal view: The rapid adoption of UAVs brings opportunity to firms looking to undertake projects that may not have been feasible otherwise, but it has also led to misconceptions, particularly about the correct equipment and sensor for a particular job.
While the market was beginning to get to grips with the capabilities of UAV technology, we have seen the regular repurposing of components that may not have originally been designed for survey applications—generally in the name of weight and cost. This is understandable: Any business wishes to reduce its costs. End-users will continue to seek the best product at the minimum price; service providers will continue to seek mechanisms to reduce their bottom line and be evermore competitive.
The case-study of the ‘lidar’ label
One area where the relationship between cost and capability needs to be considered is in the use of lidar on a UAV platform. Lidar sensors present many benefits, such as including active sensors that can collect high-density data, which can be acted upon immediately and irrespective of lighting conditions. For these reasons we see sensors that are classed as ‘lidar’ sensors used in autonomous vehicles, just as we see them on mapping platforms. The requirements of these types of application are quite different though—a lidar sensor optimally designed for autonomous vehicle applications is not necessarily optimal for survey and mapping, and vice versa. Just because two sensors are both called lidar sensors does not mean that they are the same.
A multitude of factors have meant that, typically, the sensors designed for autonomous vehicles are usually cheaper than survey specific sensors. In the interests of minimizing system costs, it is common to see the UAV community repurposing these sensors to mapping platforms, too. At the International Lidar Mapping Forum (ILMF) last month, we saw evidence of how the characteristics of different lidar types can mean different things for project requirements and success.

Detox About UAV Mapping, or What You Can Really Expect From It
In his presentation titled “Detox About UAV Mapping or What You Can Really Expect From It,” established lidar service provider Julien Vallet of Helimap System SA An his perspective. He recalled his experiences of comparing UAV photogrammetry with two systems, first a typical UAV lidar system equipped with a Velodyne VLP-16 “Puck” based system, and second, a manned airborne-lidar system that utilized the Riegl VQ 480 sensor. The photogrammetry system was termed “UAV photo,” the first lidar system “UAV lidar,” and the second “MAV lidar.” Space in this blog to does not provide room to recite project setup in detail.
The lidar systems were fulling integrated with survey-grade INS systems from Applanix and IXSEA, although the “UAV Lidar” did use the MEMS configured Applanix AP-15 INS solution designed for UAVs rather than the conventional IXSEA system used on the manned platform. Comparisons between all sensors were taken from deliverables captured at altitudes that complied with European UAV flight regulations, such as maximum AGL not exceeding 150m. It should be noted, though, that both lidar systems were flown simultaneously from the same manned helicopter platform.
As summary of the comparisons made in Helimap study that was provided in the presentations concluding table has been replicated here in Table 1.
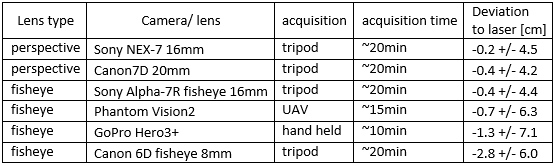
Table 1: Concluding table from “Detox About UAV Mapping or What You Can Really Expect From It”
Observations are as follows:
- In non-vegetated environments, the UAV photogrammetric product provided similar absolute accuracies to the MAV lidar.
- The lower relative accuracy of the sensor designed for automotive applications leads to overall absolute positioning too.
- Edge detail in structures mapping by the photogrammetric technique appeared smooth compared to MAV, but perhaps sensor noise levels in the UAV Lidar meant that it was difficult to differentiate detail in data from the UAV Lidar system at all.
- Locations of wires and differences between ground and vegetation could be discerned in the UAV Lidar, even though precision and accuracy was better in the MAV.
- On a standardized corridor mapping project described in the presentation, he noted that the photogrammetric technique and UAV Lidar multiple flight lines along the linear feature, while the manned system required only one.
- Published sensor specifications of the VQ-480 sensor are equivalent to, or now superseded by newer sensors in the RIEGL range designed for UAV applications, such as those sensors in its VUX series.

The NZ army prepares a UAV for launch. Source
Implications of sensor labels and their characteristics to project requirements, considerations and success
The intentions of this blog are not to promote or disparage one sensor brand over another. Instead, it is intended to highlight some of the implications that might be brought through assumptions related to sensor type, cost or onward use of data.
In the case of the Helimap casestudy, depending upon the type of project (perhaps stockpile monitoring, pit volumetrics, urban topographic mapping), it re-enforced how significant costs could be saved to both service provider and end-user if a skilled team implements a photogrammetric approach. On specific projects where lidar has been shown to provide productivity improvements such as in areas of dense vegetation or corridor mapping projects, while both types of system collect data, consideration needs to be given to the project costs and skills in the team that are required to provide deliverables that meet with project specifications.
The question needs to be asked whether capital equipment or service costs are most important, or if these costs will be outweighed by team hours or other cost ramifications if the sensor provides raw data that brings uncertainty.


