

NGS plans to replace NAD83 with a new semi-dynamic terrestrial reference frame for North America. The implementation of the plan is currently scheduled for 2022. The interim period is intended to smooth the transition to the new paradigm. The name of the new system is not yet certain but it may be called the North American Terrestrial Reference Frame (NATRF). One objective of the plan is the rectification of some long running discrepancies between the orientation of the TRF in North America and the space-based systems now used to realize it.
The orbits of GPS/GNSS satellite constellations are geocentric. The global reference frames ITRF, IGS08 and WGS84 (G1762) are also geocentric. Since GPS/GNSS is the dominant surveying utility worldwide the equivalent orientation of these reference frames makes sense. However, NAD83 is not geocentric. In fact, a comparison of NAD83 and ITRF88 three-dimensional coordinates revealed that the difference between their centers was more than 2.2 meters (~7 ft.). Nevertheless all realizations of NAD83 have been constructed on this same non-geocentric foundation. It follows, that NAD83 (2011) positions diverge systematically from any positions that rest on the geocentric reference frames. This positional difference is especially troublesome as the accuracy of so-called mapping grade GPS work done in WGS84 (G1762), a geocentric TRF, becomes more and more accurate. Soon inexpensive GPS/GNSS multi-constellation receivers will be capable of sub-meter accuracy without differential correction. The discrepancy of up to 2 meters (6.5 ft.) between NAD83 (2011) and WGS84 (G1762) will be troublesome and further exacerbated by some software products that still insist that NAD83 and WGS84 are equivalent, which has not been true since 1987.
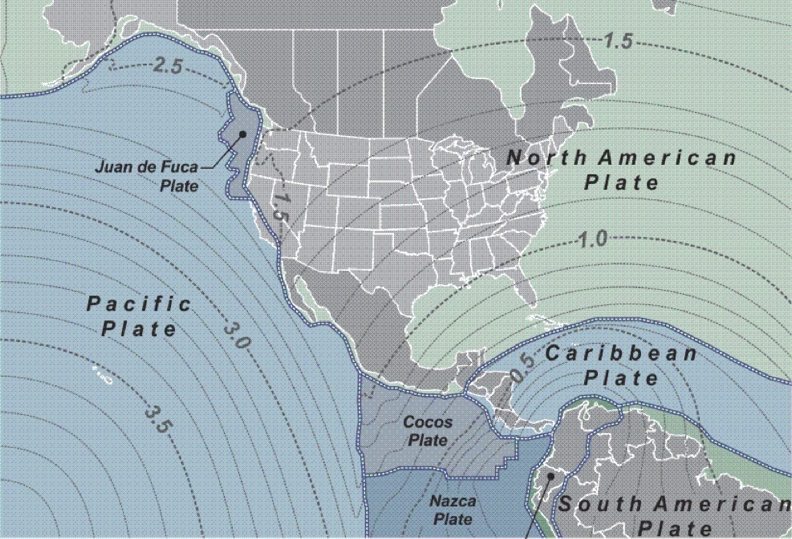
The horizontal shift in meters from NAD83 (2011) epoch 2010.0 to ITRF 2020.00 illustrated here is probably representative of the shift that will occur in 2022 when the new TRF is implemented. That shift varies from approximately 0.7 meters (2.3 feet) to approximately 2.6 meters (8.5 feet) in the Continental United States, the largest shift being along the westernmost portion of California.
There will also be a change in the public’s access to the new TRF. When implemented the new frame’s coordinates will only exist on active control, not on passive control point monuments.
In the past official static coordinates published by the NGS were assumed to be unchanging. The measurement systems available at the time created sufficiently reliable positions on passive monuments. Their constant slow movement was not apparent then because the errors in the measurement systems exceeded the extent of the motion. That is no longer the case. Measurement technology has improved dramatically. It now reveals the persistent movement. This fact has diminished the reliability of the passive control monuments and makes it hard to justify the extraordinary resources that would be necessary to keep their coordinates up-to-date. As the current passive control network becomes unsustainable the new TRF will only be directly available to users via active control.
The new paradigm will also alter the roles and responsibilities that have long supported the NSRS. For many years the NGS has established and maintained the passive control network; under the new plan that will end. That responsibility shifts onto the users. If users need passive control monuments they will need set and tie them to the NSRS themselves, but such control will not be considered an official part of the NSRS.
NGS will continue to provide users with utilities to process their data, i.e. Online Positioning User Service (OPUS), tools to transform their coordinates from NAD 83 to the new TRF and tools to assign velocities to them. Currently NGS does not report motion on passive control. Users will know that when they have a velocity on passive marks they are working in the new reference frame and not in NAD 83. When users know the movement of the monument in time they will have the option to adopt a specific epoch for their work if they wish. In other words, a user may choose to work in a non-dynamic system or, using the active control, work in the fully dynamic system.
These changes, i.e. a truly geocentric reference frame and the restriction of access to the reference frame through active control, will allow the NGS to reach their goals. Those goals include supplying geographical coordinates and ellipsoidal heights accurate to 1 mm, anytime; publishing CORS coordinates daily; continuous tracking changes in the active control network and supporting development of real-time networks.
The NGS is also working on a new vertical reference frame that will replace the North American Vertical Datum 1988, NAVD88.


